Pixel Motion Diffusion is What We Need for Robot Control
DAWN
Abstract
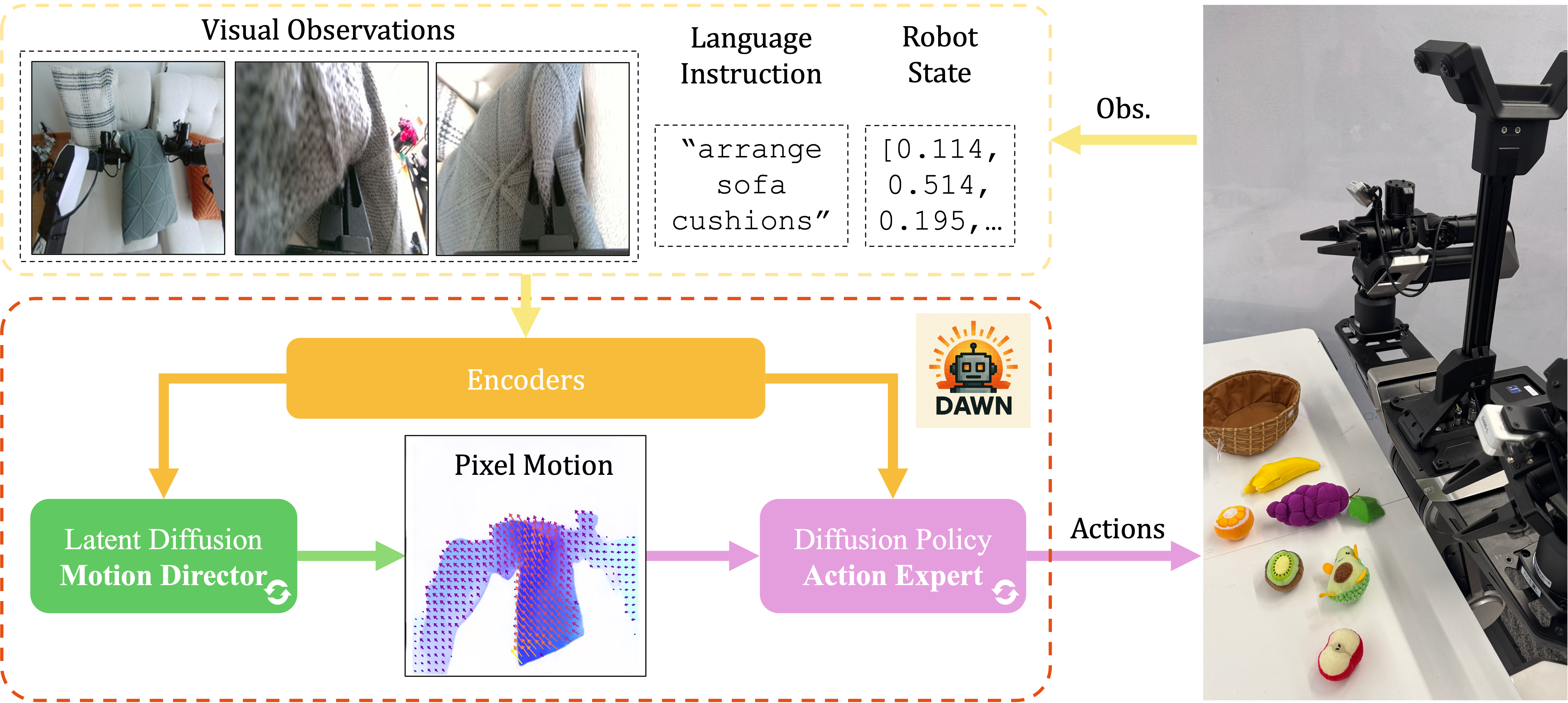
We present DAWN (Diffusion is All We Need for robot control), a unified diffusion-based framework for language-conditioned robotic manipulation that bridges high-level motion intent and low-level robot action via structured pixel motion representation. In DAWN, both the high-level and low-level controllers are modeled as diffusion processes, yielding a fully trainable, end-to-end system with interpretable intermediate motion abstractions. DAWN achieves state-of-the-art results on the challenging CALVIN benchmark, demonstrating strong multi-task performance, and further validates its effectiveness on MetaWorld. Despite the substantial domain gap between simulation and reality and limited real-world data, we demonstrate reliable real-world transfer with only minimal finetuning, illustrating the practical viability of diffusion-based motion abstractions for robotic control. Our results show the effectiveness of combining diffusion modeling with motion-centric representations as a strong baseline for scalable and robust robot learning.
Demonstrations
Bimanual Manipulation
Real World Demonstrations
See DAWN in action with real-world robotic applications and scenarios.